“PID Controller in Line Follower Robots ” Workshop
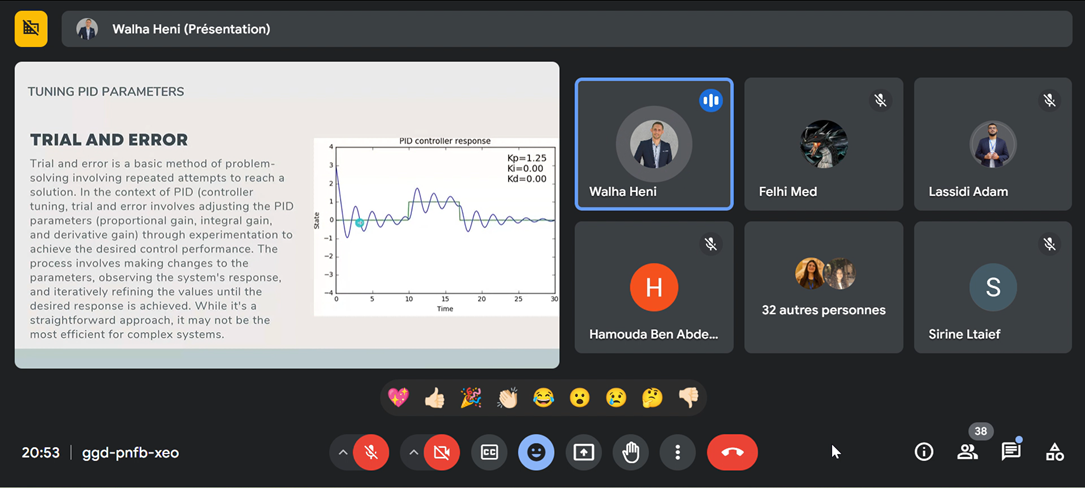
As part of the IEEE Day celebrations, a highly informative technical workshop on PID Controller in Line Follower Robots was conducted by Mr. Heni Walha. The session, which began at 8:30 PM, opened with an introduction to the PID (Proportional-Integral-Derivative) controller, where Mr. Walha thoroughly explained its core components and how it regulates systems through proportional, integral, and derivative control actions. He demonstrated how the PID controller enhances system stability, responsiveness, and precision by providing real-world examples. To further facilitate understanding, he showcased his personal Python application of the PID controller, illustrating its effectiveness in regulating system variables.
Focusing on the field of robotics, Mr. Walha highlighted the application of the PID controller in line follower robots, showing how it enables precise trajectory tracking and adaptable control—critical elements for efficient robotic navigation. He also provided a practical demonstration on implementing the PID controller using Arduino, introducing the QTRSensors.h library and its predefined functions. He detailed how to tune the KP, KI, and KD values and how to calculate the margin of error for optimal performance.
The session concluded with an interactive Q&A, where attendees could ask questions and delve into the intricacies of the PID controller. Also Mr. Walha provided valuable resources and important links to help participants deepen their understanding of the theoretical foundations and practical implementation techniques, ensuring they grasped the PID controller’s significance in their projects and its broader applications in the field of robotics.
The workshop was a successful celebration of IEEE Day, providing participants with both theoretical insights and practical applications of PID controllers, particularly within the realm of robotics. It reinforced IEEE’s commitment to knowledge-sharing and technological innovation.